




Động Cơ Điện Đồng Bộ Và Không Đồng Bộ Có Gì Khác Nhau

Bạn đang phân vân giữa việc lựa chọn động cơ điện đồng bộ và không đồng bộ (còn gọi là động cơ cảm ứng) cho thiết bị của mình? Đừng lo lắng, bài viết này sẽ giúp bạn so sánh hai loại động cơ này dựa trên các yếu tố quan trọng như tốc độ, mô men, khả năng kiểm soát, giá thành, v.v., để bạn có thể đưa ra quyết định sáng suốt nhất.
Bài viết này chỉ đưa ra những so sánh cơ bản giữa hai loại động cơ điện. Để có được lựa chọn tối ưu nhất, bạn nên tham khảo ý kiến của các chuyên gia kỹ thuật hoặc nhà cung cấp động cơ uy tín.
Nội dung
- 1. Khái niệm động cơ điện đồng bộ và không đồng bộ
- 2. So sánh động cơ điện đồng bộ và không đồng bộ
- 3. Các biện pháp bảo trì định kỳ để kéo dài tuổi thọ
- 4. Các bước cơ bản để sửa chữa các lỗi thường gặp
- 5. Giới thiệu về các xu hướng phát triển của động cơ điện
- 6. Đánh giá tác động của các xu hướng này
- Kết luận:
1. Khái niệm động cơ điện đồng bộ và không đồng bộ
Trước khi đi vào so sánh động cơ điện đồng bộ và không đồng bộ, chúng ta hãy cùng tìm hiểu sơ lược về khái niệm của 2 loại động cơ này. Cần chú ý, những thuật ngữ có tên gọi gần giống nhau, có liên quan đến công nghệ động cơ có thể dễ gây ra sự nhầm lẫn.
Vì đôi khi nhiều thuật ngữ chỉ có thể áp dụng ở các trường hợp rất cơ bản chứ không phải hàm chứa một điều gì đó khác biệt và đột phá. Và một trong những thuật ngữ cần lưu ý đó chính là “động cơ đồng bộ” và “động cơ không đồng bộ”.
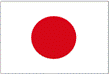
Cái “lồng sóc” này bao gồm có nhiều thanh đồng hoặc thanh nhôm
Tất cả các động cơ hoạt động dựa trên nguyên tắc cảm ứng điện từ ngày nay (induction motor – tạm gọi tắt là động cơ điện từ) đều được xem là động cơ không đồng bộ. Bản chất không đồng bộ của quá trình vận hành động cơ điện từ đến từ sự trượt giữa tốc độ quay của từ trường kết hợp với tốc độ quay chậm hơn của rotor. Còn tại sao lại có sự trượt này, cần xem lại 1 vấn đề chuyên sâu hơn ở kết cấu bên trong của động cơ.
Cái “lồng sóc” này bao gồm có nhiều thanh đồng hoặc thanh nhôm bố trí như hình ở trên. Chúng được nối với nhau bằng 2 vòng dẫn điện ở 2 đầu, làm cho các thanh ngắn mạch hoàn toàn với nhau. Còn phần lõi của rotor lại được làm bằng chất liệu thép.
Bạn có thể nhìn thấy các rãnh được chạy dọc theo bộ phận rotor. Các rãnh này thực ra cũng có lý do tồn tại của nó, đặc biệt là số lượng rãnh của rotor thường nhỏ hơn của stator. Hơn nữa, số lượng rãnh trên rotor cũng phải tránh không được là ước của stator, để tránh được tình trạng mắc kẹt từ trường (còn gọi là magnetic interlock) trong khi khởi động động cơ.
Bên cạnh động cơ roto lồng sóc, chúng ta cũng có thể thấy có rất nhiều loại động cơ sử dụng các cuộn dây. Lợi thế của kiểu cấu tạo này chính là có thể giảm tốc khởi động của động cơ nhờ vào các điện trở được đấu nối tiếp vào trong mỗi cuộn dây.
Các cuộn dây sản sinh ra dòng điện do hoạt động theo kiểu bố trí vòng trượt. Khi động cơ đã đạt được tốc độ mong muốn, thì nó sẽ chuyển qua một vòng ngắn mạch, và khi đó, động cơ lại vận hành tương tự như một động cơ lồng sóc.
2. So sánh động cơ điện đồng bộ và không đồng bộ
a) Khác nhau về cấu tạo
Những động cơ dựa trên nguyên tắc cảm ứng điện từ đều được gọi là động cơ không đồng bộ. Sự trượt giữa tốc độ quay của từ trường và tốc độ quay chậm hơn của rotor là bản chất không đồng bộ của việc vận hành động cơ điện tử.
Động cơ không đồng bộ có một thành phần quay (rotor) được mô phỏng như kiểu lồng sóc.
Cái lồng sóc này gồm nhiều thanh nhôm hoặc thanh đồng nối với nhau bằng 2 vòng dẫn điện ở 2 đầu làm các thanh gắn mạch hoàn toàn với nhau. Phần lõi của rotor được làm bằng thép.
Ngoài động cơ không đồng bộ có sử dụng lồng sắt thì còn có nhiều loại sử dụng cuộn dây nhằm giảm bớt dòng khởi động của động cơ nhờ vào các điện trở được đấu nối tiếp vào mỗi cuộn dây.
Phần Stator của động cơ là phần đứng yên trong động cơ được nối với nguồn điện xoay chiều AC để tạo ra dòng điện chạy bên trong nó.

Động cơ không đồng bộ
Động cơ đồng bộ: Đây là cấu trúc động cơ đặc biệt mà trong đó rotor quay cùng tốc độ với từ trường của Stator. Có 2 loại động cơ đồng bộ như sau:
- Kích từ độc lập: Hoạt động theo nguyên tắc tương tự giống như động cơ từ. Đây là động cơ có được từ trở thay đổi, bao gồm rotor làm bằng thép có các răng, thuộc kiểu cực lồi. Để chuyển rotor chạy sang vị trí kế tiếp, mạch điều khiển sẽ phải tuần tự chuyển đổi công suất sang cho các cuộn dây 1 cách tuyến tính, quá trình này cũng tương tự như ở động cơ bước.
- Kích từ trực tiếp: Được dùng với nam châm vĩnh cửu. Thiết kế này sẽ sử dụng 1 rotor có chứa một số nam châm vĩnh cửu và chúng có thể được lắp đặt ở trên bề mặt hoặc ráp vào phía trong.
b) Khác nhau về động cơ
Động cơ đồng bộ: Stato có các khe dọc theo phần trục, bao gồm các khe của cuộn dây stato được làm theo một số cực cụ thể. Nói chung, 1 rotor cực mạnh thường được gắn trên đó 1 cuộn dây rôto. Cuộn dây roto sẽ cung cấp cho nguồn cung cấp DC nhờ vào sự trợ giúp của vòng trượt. Ngoài ra, bạn cũng có thể sử dụng một cánh quạt cùng với nam châm vĩnh cửu là đủ.
Động cơ không đồng bộ: Cuộn dây stato bên trong cũng tương tự như động cơ đồng bộ. Đó là dấu hiệu cho một số cực cụ thể của một rôto lồng sóc hoặc một rôto dây quấn có thể được sử dụng. Trong rôto lồng sóc, các thanh rôto cũng được ngắn mạch vĩnh viễn cùng với các vòng cuối. Trong rôto dây quấn, cuộn dây cũng bị ngắn mạch vĩnh viễn, do đó lúc này sẽ không cần vòng trượt.
Động cơ không đồng bộ có nhiều điểm đặc biệt
c) So sánh hiệu suất làm việc
Động cơ đồng bộ: Các cực của stato chuyển động quay với tốc độ đồng bộ (Ns) khi đã được cung cấp điện bởi nguồn cung cấp 3 pha. Các cánh quạt cũng được cung cấp với một nguồn điện DC. Roto cần được quay cùng với tốc độ gần với tốc độ đồng bộ của động cơ trong quá trình khởi động.
Nếu được vận hành như vậy, các cực của roto cũng được ghép từ tính với các cực của bộ phận stato quay. Khi đó, roto bắt đầu quay để đạt được tốc độ của động cơ đồng bộ. Động cơ đồng bộ thì sẽ luôn chạy ở tốc độ bằng với tốc độ đồng bộ của nó. Tức là tốc độ thực tế sẽ = tốc độ đồng bộ hoặc số vòng dây N = Ns = 120f / P.
Động cơ không đồng bộ (động cơ cảm ứng): Khi stato được cung cấp điện bởi nguồn cung cấp AC 2 pha hoặc 3 pha, từ trường quay (ký hiệu RMF) cũng được tạo ra. Tốc độ tương đối giữa từ trường quay của stato và phần rôto sẽ gây ra dòng điện cảm ứng bên trong các dây dẫn của rôto. Dòng điện rôto lúc này sẽ làm tăng thông cho lượng rôto.
Theo định luật Lenz, lúc này hướng của dòng điện cảm ứng chính là xu hướng chống lại nguyên nhân sản xuất ra nó, tức là tốc độ tương đối của từ trường quay RMF giữa stato và roto. Do đó, roto sẽ cố gắng để bắt kịp với RMF và giảm thiểu được tốc độ tương đối. Động cơ cảm ứng cũng sẽ luôn chạy ở tốc độ nhỏ hơn so với tốc độ đồng bộ, tức là: N <Ns.
Động cơ cảm ứng luôn chạy ở tốc độ nhỏ hơn so với tốc độ đồng bộ
d) Độ bền và khả năng tiết kiệm năng lượng
Động cơ đồng bộ luôn yêu cầu phải có một nguồn điện 1 chiều DC bổ sung để cung cấp năng lượng vào trong cuộn dây roto. Động cơ cảm ứng không đồng bộ thì không yêu cầu bất kỳ 1 nguồn năng lượng bổ sung nào cả.
Vòng trượt và bàn chải của động cơ được yêu cầu bên trong động cơ đồng bộ, nhưng không phải là ở trong động cơ cảm ứng. Ngoại trừ trường hợp động cơ cảm ứng loại dây quấn, trong đó động cơ vòng trượt sẽ được sử dụng để tăng thêm điện trở ở phía bên ngoài của cuộn dây rôto.
Động cơ đồng bộ thông thường sẽ yêu cầu cơ chế khởi động bổ sung để cho ban đầu quay roto gần bằng với tốc độ đồng bộ. Không có cơ chế khởi động được yêu cầu ở bên trong động cơ cảm ứng.
Hệ số công suất được xác định của động cơ đồng bộ còn có thể được điều chỉnh thành độ trễ, sự thống nhất hoặc dẫn đầu cũng như thay đổi phương pháp kích thích. Trong khi đó, động cơ không đồng bộ luôn chạy ở hệ số công suất trễ hơn. Động cơ đồng bộ thường hoạt động hiệu quả hơn so với động cơ cảm ứng. Nhưng về giá thành sản phẩm, động cơ đồng bộ có chi phí đắt đỏ hơn.
e) So sánh về ứng dụng trong thực tế
Động cơ đồng bộ được ứng dụng rộng rãi trong các hệ điều khiển yêu cầu phải có độ chính xác cao và đem lại khả năng tiết kiệm điện năng hết sức, đặc biệt là khi chạy không tải hoặc có tải nhẹ. Do đó, động cơ đồng bộ thường được sử dụng nhiều trong các loại động cơ có công suất lớn, chẳng hạn như: cần cẩu, máy xúc, máy kéo,...
Động cơ không đồng bộ vốn là loại động cơ đáp ứng được tối đa yêu cầu về việc điều chỉnh tốc độ. Dãy công suất của động cơ không đồng bộ khá rộng, trải dài từ vài W cho đến hàng nghìn KW. Trên thị trường hiện nay, hầu hết động cơ được sử dụng cho máy móc đều là động cơ 3 pha, chỉ có 1 sống dòng động cơ 1 pha là có công suất động cơ thuộc dạng nhỏ.
Khi máy điện không đồng bộ 3 pha vận hành riêng lẻ, tức là khi không có dòng điện chạy vào dây quấn stato của động cơ. Lúc này người ta sẽ phải tiến hành kích từ cho máy. Đây chính cũng là nhược điểm lớn nhất chưa khắc phục được của chiếc máy phát điện chạy bằng động cơ không đồng bộ.
3. Các biện pháp bảo trì định kỳ để kéo dài tuổi thọ
Kiểm tra định kỳ độ cách điện của động cơ
- Kiểm tra độ cách điện giữa các cuộn dây và vỏ động cơ để phát hiện sớm các vấn đề về cách điện.
- Sử dụng các thiết bị đo chuyên dụng như máy đo điện trở cách điện, máy đo điện môi.
- Nếu phát hiện độ cách điện giảm sẽ làm tăng nguy cơ chập mạch và hư hỏng động cơ.
Tra dầu mỡ bôi trơn cho các ổ đỡ
- Sử dụng dầu mỡ chuyên dụng, phù hợp với từng loại ổ đỡ.
- Bôi trơn định kỳ giúp giảm ma sát, hạn chế mài mòn và tăng tuổi thọ cho ổ đỡ.
- Kiểm tra bề mặt tiếp xúc của ổ đỡ, thay thế kịp thời nếu phát hiện hư hỏng.
Vệ sinh bụi bẩn bám trên động cơ
- Bụi bẩn làm giảm khả năng tản nhiệt của động cơ.
- Sử dụng khí nén, chổi lông mềm để làm sạch bụi bám trên bề mặt tản nhiệt.
- Vệ sinh định kỳ giúp động cơ hoạt động ổn định, kéo dài tuổi thọ.
Bảo dưỡng hệ thống khởi động
- Áp dụng cho động cơ không đồng bộ, giúp động cơ khởi động mềm mại hơn.
- Kiểm tra bộ khởi động mềm, bộ biến tần, sửa chữa thay thế kịp thời khi cần thiết.
- Giúp động cơ hoạt động ổn định hơn, ít hư hỏng bất ngờ.
Theo dõi và ghi chép các thông số hoạt động
- Theo dõi liên tục các thông số: dòng điện, điện áp, nhiệt độ, tốc độ quay.
- Phát hiện sớm các dấu hiệu bất thường để có biện pháp xử lý kịp thời.
- Ghi chép đầy đủ các thông tin về quá trình vận hành và bảo trì để tham khảo.
4. Các bước cơ bản để sửa chữa các lỗi thường gặp
Xác định nguyên nhân gây lỗi
- Dựa trên các triệu chứng và thông số hoạt động để phân tích nguyên nhân.
- Sử dụng các thiết bị chẩn đoán chuyên dụng như máy phân tích độ rung để hỗ trợ.
Thay thế các bộ phận bị hư hỏng
- Tháo dỡ và kiểm tra từng bộ phận để xác định phần nào bị hỏng.
- Thay thế bằng linh kiện chính hãng, đảm bảo chất lượng, tương thích tốt.
Kiểm tra và điều chỉnh lại các thông số
- Sau khi sửa chữa, cần kiểm tra lại các thông số kỹ thuật và điều chỉnh cho phù hợp.
- Đảm bảo động cơ hoạt động bình thường trước khi đưa vào sử dụng trở lại.
Ghi chép lại quá trình sửa chữa
- Ghi lại đầy đủ các bước tháo lắp, linh kiện thay thế, thông số điều chỉnh.
- Lưu lại hồ sơ sửa chữa chi tiết để tham khảo khi cần.
5. Giới thiệu về các xu hướng phát triển của động cơ điện
Động cơ điện thế hệ mới
- Sử dụng các vật liệu tiên tiến như nam châm đất hiếm, siêu dẫn ở nhiệt độ cao.
- Cải tiến công nghệ chế tạo và điều khiển động cơ.
- Hiệu suất cao hơn, tiết kiệm năng lượng và thân thiện môi trường hơn.
Động cơ tiết kiệm năng lượng
- Tối ưu hóa thiết kế để giảm tổn thất năng lượng trong quá trình hoạt động.
- Sử dụng các vật liệu cách điện tốt, giảm thiểu rò rỉ từ trường.
- Đáp ứng xu thế tiết kiệm năng lượng và bảo vệ môi trường.
6. Đánh giá tác động của các xu hướng này
Ngành công nghiệp
- Nâng cao năng lực cạnh tranh cho các nhà sản xuất.
- Tăng hiệu quả sản xuất, tiết kiệm chi phí năng lượng.
- Góp phần bảo vệ môi trường theo xu thế chung.
Người tiêu dùng
- Sử dụng các thiết bị và máy móc hiện đại, tiết kiệm điện năng hơn.
- Đóng góp cho việc bảo vệ môi trường bền vững.
- Nâng cao chất lượng cuộc sống thông qua các sản phẩm thân thiện môi trường.
Kết luận:
Bài viết "So sánh động cơ điện đồng bộ và không đồng bộ" đã cung cấp cho người đọc những thông tin chi tiết về hai loại động cơ điện phổ biến này. Bài viết đã so sánh hai loại động cơ về cấu tạo, nguyên lý hoạt động, hiệu suất, độ bền, ứng dụng thực tế, giá thành, v.v.
Bên cạnh đó, bài viết cũng đưa ra các ví dụ cụ thể về cách lựa chọn động cơ phù hợp, các biện pháp bảo trì định kỳ, các bước sửa chữa cơ bản và các xu hướng phát triển của động cơ điện trong tương lai.
Với những thông tin được cung cấp trong bài viết, người đọc có thể lựa chọn được loại động cơ phù hợp với nhu cầu sử dụng của mình và sử dụng động cơ hiệu quả, an toàn và tiết kiệm năng lượng.
Nội Dung Có Thể Bạn Quan Tâm:
- Motor 1.5kw
- Động Cơ Điện 3 Pha: Cấu Tạo, Nguyên Lý Hoạt Động Và Ứng Dụng
- Giá Động Cơ Điện 3 Pha Đức Nhật Đài Loan, Các Hãng, Các Công Suất
- Động Cơ Điện Không Đồng Bộ Khái Niệm, Cấu Tạo, Nguyên Lý Hoạt Động, Ứng Dụng
- Những Cuốn Giáo Trình Động Cơ Không Đồng Bộ 3 Pha “Hot” Nhất Hiện Nay
- Động Cơ Điện: Những Loại Mô Tơ Quan Trọng Nhất Trong Đời Sống, Tính Năng Và Ý Nghĩa Kỹ Thuật.
- Động Cơ Điện 1 Pha: Cấu Tạo, Nguyên Lý Hoạt Động Và Ứng Dụng
- Thông Số Kỹ Thuật Motor Điện, Cách Đọc Tem, Kiểm Tra Hiệu Suất Motor, Tiêu Chuẩn Tiết Kiệm Điện
- Khái Niệm Motor Điện. Các Phương Pháp Đấu Điện Khởi Động Motor 3 Pha




