




Hướng Dẫn Sử Dụng Bộ Điều Khiển Tốc Độ Motor DC

Bạn đang cần điều khiển tốc độ motor DC một cách chính xác và hiệu quả? Bạn muốn khai thác tối đa tiềm năng của motor và tiết kiệm năng lượng? Hướng Dẫn Sử Dụng Bộ Điều Khiển Tốc Độ Motor DC chính là chìa khóa dành cho bạn!
Bộ điều khiển tốc độ motor DC là công cụ đắc lực giúp bạn làm chủ tốc độ motor, đáp ứng nhu cầu đa dạng trong các ứng dụng thực tế.
Hướng Dẫn Sử Dụng Bộ Điều Khiển Tốc Độ Motor DC cung cấp cho bạn thông tin chi tiết về:
- Cấu tạo và nguyên lý hoạt động của bộ điều khiển.
- Cách lựa chọn bộ điều khiển phù hợp với nhu cầu sử dụng.
- Hướng dẫn cài đặt và sử dụng bộ điều khiển một cách đơn giản, dễ hiểu.
- Mẹo và thủ thuật để tối ưu hóa hiệu quả hoạt động của bộ điều khiển.
Với hướng dẫn này, bạn sẽ tự tin điều khiển tốc độ motor DC một cách chuyên nghiệp, nâng tầm hiệu quả và tiết kiệm chi phí. Hãy bắt đầu hành trình chinh phục tốc độ ngay hôm nay!
Hãy cùng khám phá thế giới điều khiển tốc độ motor DC đầy tiềm năng!
Nội dung
- 1. Điều khiển tốc độ motor DC khái niệm, phân loại?
- 2. Mạch điều khiển tốc độ motor DC bằng Arduino
- 3. Sơ đồ mạch điều khiển tốc độ motor PWM DC
- 4. Mạch điều khiển tốc độ motor DC bằng mạch cầu H
- 5. Mạch điều khiển tốc độ motor dc 220V với chip L298N
- 6. Bộ điều khiển tốc độ Arduino và L298N
- 7. Bộ điều khiển xe Arduino bằng bộ điều khiển L298N
- 8. An Toàn Khi Làm Việc Với Điện
- 9. So Sánh Với Motor AC
- 10. Các Ứng Dụng Cụ Thể
- 11. Hướng Dẫn Chọn Mua Motor và Bộ Điều Khiển
- 12. Bảo Dưỡng và Tuổi Thọ của Motor DC
- 13. Công Nghệ Mới và Xu Hướng Trong Điều Khiển Motor DC
- Kết Luận
1. Điều khiển tốc độ motor DC khái niệm, phân loại?
Động cơ 1 chiều DC (viết tắt của cụm từ Direct Current Motors) là loại động cơ điều khiển bằng dòng điện có hướng xác định. Hay nói dễ hiểu hơn thì đây chính là loại động cơ hoạt động bằng nguồn điện áp DC (điện áp 1 chiều). Bộ điều khiển tốc độ motor có đầu dây ra của động cơ thường gồm 2 dây (dây nguồn còn gọi là VCC và dây tiếp đất là GND). Do đó, DC motor chính là động cơ 1 chiều cùng với cơ năng chuyển động quay liên tục.
Bộ điều khiển tốc độ motor DC 220V
Bộ điều khiển tốc độ motor PWM DC Motor Speed Controller 40A là thiết bị được sử dụng để điều điều khiển tốc độ của động cơ DC với công suất tối đa có thể lên đến 400W. Động cơ điện 1 chiều được phân loại theo kích từ, chia thành những loại sau:
- Kích từ song song,
- Kích từ nối tiếp,
- Kích từ độc lập,
- Kích từ hỗn hợp.
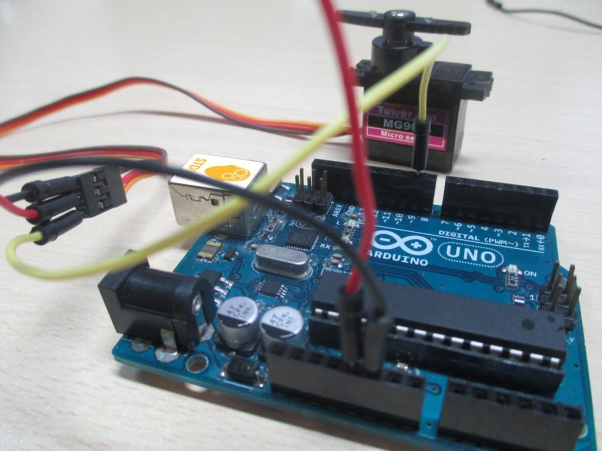
2. Mạch điều khiển tốc độ motor DC bằng Arduino
Trong bộ điều khiển động cơ DC bằng Arduino này, chúng ta sẽ cùng tìm hiểu cách điều khiển của động cơ DC bằng Arduino. Chúng ta cũng nên xem xét một số kỹ thuật cơ bản để có thể điều khiển được động cơ DC và đưa ra các ví dụ cụ thể. Thông qua đó, chúng ta sẽ tìm hiểu cách điều khiển động cơ DC bằng trình điều khiển L298N và cả hệ thống board Arduino.
3. Sơ đồ mạch điều khiển tốc độ motor PWM DC
Tín hiệu PWM hay thay đổi giá trị của độ rộng xung, đây cũng là một kỹ thuật cho phép người dùng điều chỉnh giá trị trung bình của điện áp cho đến các thiết bị điện tử bằng phương pháp bật tắt nguồn với tốc độ cực nhanh.
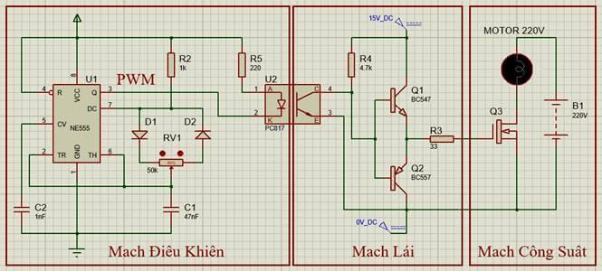
Điều khiển động cơ PWM DC hay thay đổi giá trị của độ rộng xung
Vì vậy, còn tùy thuộc vào kích thước cụ thể của động cơ, chúng ta có thể chỉ cần kết nối phần đầu ra Arduino vào chân của điện trở hoặc phần chân của MOSFET và lúc này có thể điều khiển tốc độ của động cơ bằng phương pháp điều khiển đầu ra PWM.
Tín hiệu Arduino có công suất thấp, bật tắt ở phần chân tại MOSFET, cũng thông qua đó, loại động cơ công suất cao này được điều khiển. Lưu ý thêm nữa là Arduino GND và nguồn cung cấp năng lượng của động cơ là GND nên có thể được kết nối với nhau.
4. Mạch điều khiển tốc độ motor DC bằng mạch cầu H
Mặt khác, để giúp điều khiển hướng của chuyển động quay, chúng ta chỉ cần đảo ngược chiều hướng của dòng điện chạy qua động cơ. Và phương pháp phổ biến nhất để giúp bạn làm điều đó chính là sử dụng mạch cầu H.
Một mạch cầu H chứa đến 4 chân chuyển mạch, thêm cả điện trở hoặc MOSFET cùng với động cơ ở trung tâm nhằm tạo thành 1 cấu hình trông giống như chữ H. Bằng phương pháp kích hoạt 2 công tắc cụ thể cùng 1 lúc, chúng ta có thể thay đổi hướng chuyển động của dòng điện, do đó có thể thay đổi được hướng quay của động cơ.
Vì vậy, nếu có thể kết hợp 2 phương thức này, bộ điều chỉnh PWM và H -Bridge, bạn cũng có thể kiểm soát hoàn toàn tốc độ của động cơ DC. Có nhiều trình để điều khiển động cơ DC, trong đó có các tính năng này, đồng thời L298N chính là một trong số đó.
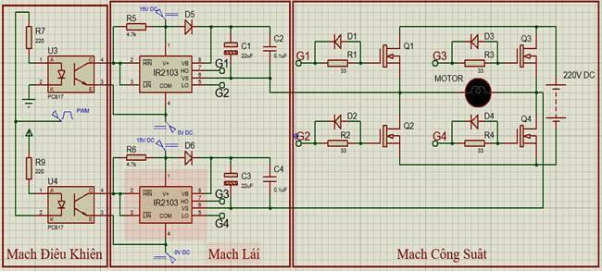
Sơ đồ điều khiển động cơ DC bằng mạch cầu H
5. Mạch điều khiển tốc độ motor dc 220V với chip L298N
L298N chính là trình điều khiển của động cơ H-Bridge kép, chúng sẽ cho phép điều khiển tốc độ và hướng của 2 động cơ DC cùng 1 lúc. Mô đun này có thể điều khiển được động cơ DC có điện áp nằm trong khoảng từ 5 35V, với dòng điện cực đại có thể lên đến 2A.
Xem xét kỹ lưỡng hơn về phần sơ đồ chân của mô đun L298N, chúng ta có thể giải thích nguyên lý hoạt động của nó. Mô đun này gồm có 2 nhóm chân cho động cơ là A và B. Và 1 chân ở giữa điều chỉnh cho chân Ground, sử dụng VCC cho động cơ và phần chân 5V được xem là đầu vào hoặc cũng có thể là đầu ra.
Điều này còn phụ thuộc vào điện áp được chúng ta sử dụng tại động cơ VCC. Mô đun này cũng có bộ điều chỉnh 5V ở trên board được bật/ tắt bằng hình thức sử dụng dây nối. Nếu điện áp được cung cấp vào động cơ lên đến 12V thì chúng ta có thể kích hoạt được bộ điều chỉnh 5V và lúc này chân 5V có thể được dùng để làm đầu ra, chẳng hạn để cấp nguồn cho mạch điều khiển board Arduino.
Cần lưu ý thêm ở đây rằng, con IC này có thể làm giảm điện áp xuống khoảng 2V. Vì vậy, nếu chúng ta đang sử dụng nguồn điện 12V thì điện áp tại các chân động cơ sẽ có giá trị vào khoảng 10V. Điều đó có nghĩa là người dùng sẽ không thể cung cấp được tốc độ tối đa chạy ra khỏi động cơ DC được.
Tiếp theo là các đầu vào của bộ điều khiển logic với các chân bật A và bật B được sử dụng để thực hiện việc bật và kiểm soát kỹ lưỡng tốc độ của động cơ. Nếu 1 dây có mặt ở trên chân này thì động cơ sẽ được kích hoạt ngay lập tức ở tốc độ tối đa.
Còn nếu loại bỏ được sợi dây, chúng ta đã có thể kết nối ngay 1 đầu vào bộ điều chỉnh PWM với chân này. Cũng theo cách đó, bạn có thể kiểm soát được tốc độ của động cơ. Nếu chúng ta kết nối phần chân này với bộ phận Ground, động cơ sẽ tự động bị vô hiệu hóa.
Mạch điều khiển tốc độ motor dc 220V với chip L298N
Tiếp theo, sử dụng các chân đầu vào số 1 và số 2 để điều khiển hướng quay hiện tại của động cơ A cũng như đầu vào 3 và 4 của động cơ B. Sử dụng các chân này, chúng ta có thể điều khiển các công tắc của mạch cầu H nằm ở bên trong con IC L298N.
Nếu đầu vào 1 được xác định ở mức thấp và đầu vào 2 được xác định là cao thì động cơ sẽ di chuyển nhanh chóng về phía trước và ngược lại thì động cơ sẽ di chuyển theo hướng lùi. Trong trường hợp cả 2 đầu vào đều có giá trị giống nhau thì động cơ sẽ dừng, áp dụng tương tự cho đầu vào 3 và 4 của động cơ B.
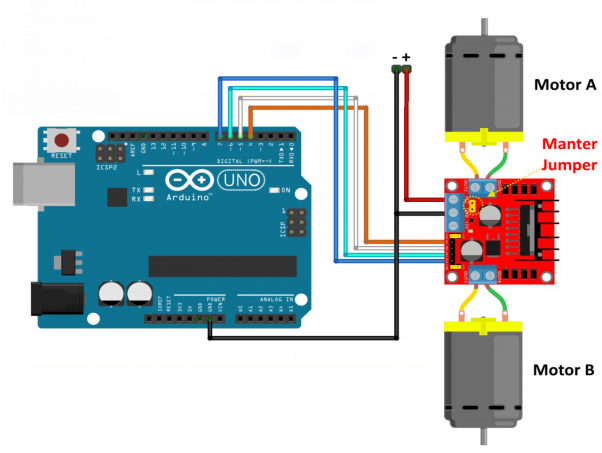
6. Bộ điều khiển tốc độ Arduino và L298N
Để điều khiển tốc độ của động cơ DC bằng biến trở, đồng thời thay đổi hướng quay chỉ bằng 1 nút ấn. Vì vậy, chúng ta cần sử dụng 1 trình điều khiển của L298N, động cơ DC kết hợp với biến trở, nút ấn và mạch board Arduino.
Các linh kiện cần thiết: Bộ điều khiển tốc độ L298N, động cơ DC 12V, Board Arduino, Breadboard và dây nối. Trước tiên, chúng ta cần xác định được các chân và 1 số cảm biến cần thiết dành cho chương trình. Trong phần sơ đồ thiết lập, chúng ta cần cài đặt các chế độ chân và chiều hướng quay ban đầu của động cơ.
Trong phần vòng lặp, hãy bắt đầu bằng cách đọc giá trị của biến trở và sau đó thực hiện ánh xạ giá trị nhận được từ 0 1023, còn giá trị từ 0 255 dành cho tín hiệu PWM, hoặc đó có thể là chu kỳ nhiệm vụ 0 100% của tín hiệu PWM. Sau đó, bằng phương pháp sử dụng chức năng analogWrite (), chúng ta sẽ gửi tín hiệu PWM đến phần chân Bật của hệ thống board L298N, từ đó sẽ điều khiển được động cơ.
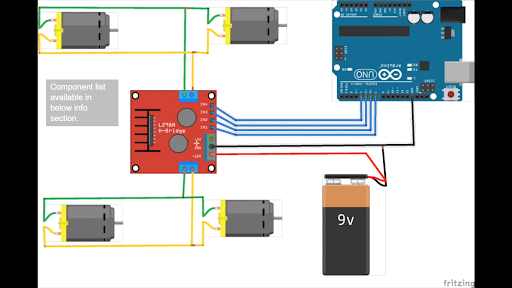
7. Bộ điều khiển xe Arduino bằng bộ điều khiển L298N
Chuẩn bị 2 motor DC, board Arduino, trình điều khiển L298N và cần điều khiển. Về nguồn điện, lựa chọn sử dụng 3 cục pin Li-ion 3.7V, nguồn điện cung cấp tổng cộng 11V. Làm 1 cái khung xe bằng ván ép dày khoảng 3mm, gắn các động cơ vào đó rồi gắn bánh xe vào động cơ, còn ở phía trước bạn gắn 1 bánh xe xoay.
Sau khi xác định được các chân, chúng ta hãy đọc các giá trị của trục X và Y trong phím điều khiển. Cần điều khiển lúc này được làm bằng 2 biến trở và được kết nối với phần đầu vào analog của Arduino, khi đó chúng có giá trị từ 0 1023. Khi cần điều khiển nằm ở vị trí trung tâm, giá trị của cả 2 chiếc biến trở hoặc trục sẽ vào khoảng 512.
Thêm một chút dung sai vào bộ điều khiển và có giá trị từ 470 550 là chính. Vì vậy, nếu thực hiện việc di chuyển trục Y của phím giúp điều khiển lùi và giá trị được giảm xuống dưới 470. Khi đó chúng ta sẽ đặt hướng quay của 2 động cơ lùi về phía sau sử dụng 4 chân đầu vào. Sau đó, thực hiện chuyển đổi các giá trị, trong đó giảm dần từ 470 xuống 0 thành việc tăng thêm giá trị PWM từ 0 255, đây chính là tốc độ thực sự của động cơ.
Điều khiển xe Arduino bằng bộ điều khiển L298N
Tiếp theo, hãy sử dụng trục X để điều khiển phần bên trái và bên phải của động cơ. Thực hiện việc chuyển đổi con số đọc trục X trở thành giá trị của tốc độ có độ lớn từ 0 255. Để di chuyển sang phía bên trái, bạn cần sử dụng giá trị này để có thể giảm tốc độ động cơ ở bên trái, đồng thời tăng tốc độ động cơ ở phía bên phải. Ở đây, căn cứ vào các hàm số học, bạn hãy sử dụng 2 câu lệnh if để giới hạn thay đổi phạm vi tốc độ của động cơ từ 0 255.
8. An Toàn Khi Làm Việc Với Điện
Khi làm việc với motor DC và các bộ điều khiển, việc đảm bảo an toàn là ưu tiên hàng đầu. Luôn nhớ tắt nguồn điện trước khi tiến hành kết nối hoặc sửa chữa các thiết bị điện tử. Điều này sẽ ngăn ngừa nguy cơ bị điện giật. Ngoài ra, hãy sử dụng găng tay cách điện và đảm bảo rằng bạn làm việc trong môi trường khô ráo, tránh xa nước hoặc chất lỏng khác. Điều này sẽ giảm thiểu nguy cơ bị điện giật do ẩm ướt.
Hãy đọc kỹ hướng dẫn sử dụng và tuân thủ các quy định an toàn khi lắp đặt và vận hành motor. Các nhà sản xuất thường cung cấp các hướng dẫn chi tiết để đảm bảo an toàn tối đa khi sử dụng sản phẩm của họ. Tuân thủ các quy định này sẽ giúp ngăn ngừa tai nạn đáng tiếc xảy ra.
9. So Sánh Với Motor AC
Motor DC thường được sử dụng trong các ứng dụng đòi hỏi tốc độ và hướng quay dễ điều chỉnh, như trong lĩnh vực robot, xe điều khiển từ xa hoặc các thiết bị tự động khác. Ưu điểm của motor DC là có thể dễ dàng điều chỉnh tốc độ bằng cách thay đổi điện áp đầu vào.
Trong khi đó, motor AC thường được tìm thấy trong các ứng dụng cố định, như máy công nghiệp hoặc thiết bị gia dụng, nơi tốc độ không cần điều chỉnh thường xuyên. Motor AC có cấu tạo phức tạp hơn nhưng hoạt động ổn định hơn so với motor DC.
Lựa chọn giữa motor DC và AC phụ thuộc vào yêu cầu cụ thể của từng dự án. Nếu cần điều chỉnh tốc độ linh hoạt thì motor DC là sự lựa chọn tốt, còn đối với các ứng dụng cố định thì motor AC phù hợp hơn.
10. Các Ứng Dụng Cụ Thể
Motor DC có nhiều ứng dụng thực tế, từ việc tạo ra các hệ thống tự động hóa trong công nghiệp, đến việc điều khiển các phương tiện điều khiển từ xa như xe đồ chơi, tàu ngầm không người lái, thậm chí là trong các dự án DIY như robot tự chế.
Ưu điểm của motor DC là dễ dàng điều khiển tốc độ và chiều quay. Chính sự linh hoạt này làm cho motor DC trở thành sự lựa chọn ưu tiên cho nhiều dự án sáng tạo đòi hỏi khả năng điều khiển chính xác và mức độ tự động hóa cao.
11. Hướng Dẫn Chọn Mua Motor và Bộ Điều Khiển
Khi chọn motor DC, cần xem xét các thông số như công suất, điện áp, dòng điện định mức và tốc độ quay. Những thông tin này giúp đảm bảo motor phù hợp với nhu cầu sử dụng.Đồng thời, kích thước và trọng lượng của motor cũng quan trọng trong một số ứng dụng như robot. Một số motor có tính năng điều khiển hướng quay và đảo chiều tiện lợi.Về bộ điều khiển, cần chọn model có dòng điện và điện áp phù hợp để điều khiển motor. Các tính năng bổ sung như PWM hay encoder cũng cần xem xét để đáp ứng tốt nhất nhu cầu điều khiển motor.
12. Bảo Dưỡng và Tuổi Thọ của Motor DC
Để kéo dài tuổi thọ hoạt động của motor DC, cần thực hiện bảo dưỡng định kỳ như sau:
- Kiểm tra và vệ sinh các bụi bẩn trên motor
- Kiểm tra độ chặt của các đinh vít
- Kiểm tra độ mòn của thanh cổ và bạc đạn
- Bôi trơn thanh cổ bằng mỡ bò hoặc dầu mỏ
Ngoài ra, hạn chế để motor hoạt động ở tải trọng cao trong thời gian dài, giữ môi trường làm việc thông thoáng và tránh tiếp xúc với chất lỏng, hơi ẩm.
13. Công Nghệ Mới và Xu Hướng Trong Điều Khiển Motor DC
Công nghệ điều khiển motor DC đang phát triển theo hướng tự động hóa và kết nối thông minh hơn. Một số xu hướng đáng chú ý:
- Sử dụng trí tuệ nhân tạo và máy học để tối ưu hóa hiệu suất hoạt động của motor
- Các bộ điều khiển tích hợp cảm biến, cho phép điều chỉnh tốc độ và hướng thông minh dựa trên dữ liệu phản hồi
- Khả năng kết nối internet (IoT) trên các bộ điều khiển, cho phép giám sát và điều khiển từ xa
Áp dụng các công nghệ mới này sẽ giúp tối ưu hóa hoạt động của motor DC, đồng thời tiết kiệm năng lượng và nâng cao trải nghiệm người dùng.
Kết Luận
Việc điều khiển tốc độ motor DC không chỉ đơn thuần là một kỹ thuật quan trọng trong lĩnh vực điện tử và tự động hóa mà còn mở ra cánh cửa cho hàng loạt các ứng dụng sáng tạo trong công nghệ, từ robotics đến các dự án DIY tại nhà. Bằng cách hiểu rõ về cấu tạo, nguyên lý hoạt động của motor và bộ điều khiển, cũng như cách lựa chọn, cài đặt và bảo dưỡng chúng, bạn có thể tối ưu hóa hiệu suất sử dụng và kéo dài tuổi thọ của motor, đồng thời tiết kiệm năng lượng.
Ngoài ra, việc liên tục cập nhật thông tin về công nghệ mới và tham gia vào cộng đồng sẽ giúp bạn nắm bắt được các xu hướng mới và áp dụng thành công vào các dự án của mình. Đừng ngần ngại thử nghiệm và thực hành - bởi lẽ qua mỗi dự án, kỹ năng và kiến thức của bạn sẽ được cải thiện, mở rộng khả năng sáng tạo và khám phá thế giới kỹ thuật số phong phú.
Nội Dung Có Thể Bạn Quan Tâm:
- Bộ Điều Chỉnh Tốc Độ Motor: Cấu Tạo, Ứng Dụng, Thông Số Kỹ Thuật Và Cách Lựa chọn
- Motor Giảm Tốc Mini Tỉ Số Truyền, Thông Số Kỹ Thuật
- Quy Trình Bảo Dưỡng Định Kỳ Motor Hộp Giảm Tốc Các Loại
- Hộp Giảm Tốc Băng Tải: Cấu Tạo, Ứng Dụng, Thông Số Kỹ Thuật Và Cách Lựa chọn
- Giá Motor Giảm Tốc 3 Pha Nhật Đức Đài Loan Ý
- Hướng Dẫn Các Bước Tháo Lắp Hộp Giảm Tốc, Thay Thế, Bảo Dưỡng
- Tìm Hiểu Động Cơ Băng Tải Cách chọn Công Suất, Lực Momen Và Tỉ Số Truyền




